


Yn y blog gwadd hwn, mae Dr Alexander Eriksson yn trafod y sefyllfa bresennol o ran datblygu'r dechnoleg synhwyrydd sydd ei hangen i gefnogi cerbydau awtonomaidd.
Mae Dr Eriksson yn ymchwilydd gwadd ym Mhrifysgol Southampton, yn ymchwilydd yn Sefydliad Ymchwil Ffyrdd a Thrafnidiaeth Cenedlaethol Sweden, ac yn Arweinydd Maes Cymhwysedd ar gyfer Rhaglenni Efelychu Gyrru yng Nghanolfan Diogelwch Cerbydau a Thraffig SAFER yn Chalmers, Sweden.
Er nad yw rheoleiddio adeiladu, offer a defnydd cerbydau modur wedi'i ddatganoli i Gymru, bydd y Pwyllgor Economi, Seilwaith a Sgiliau yn edrych ar oblygiadau cerbydau awtonomaidd i Gymru ar 23 Mai. Mae'r blog hwn yn rhoi cipolwg ar y broses ddatblygu ar gyfer y dechnoleg a rhai materion allweddol sydd i'w datrys o hyd.
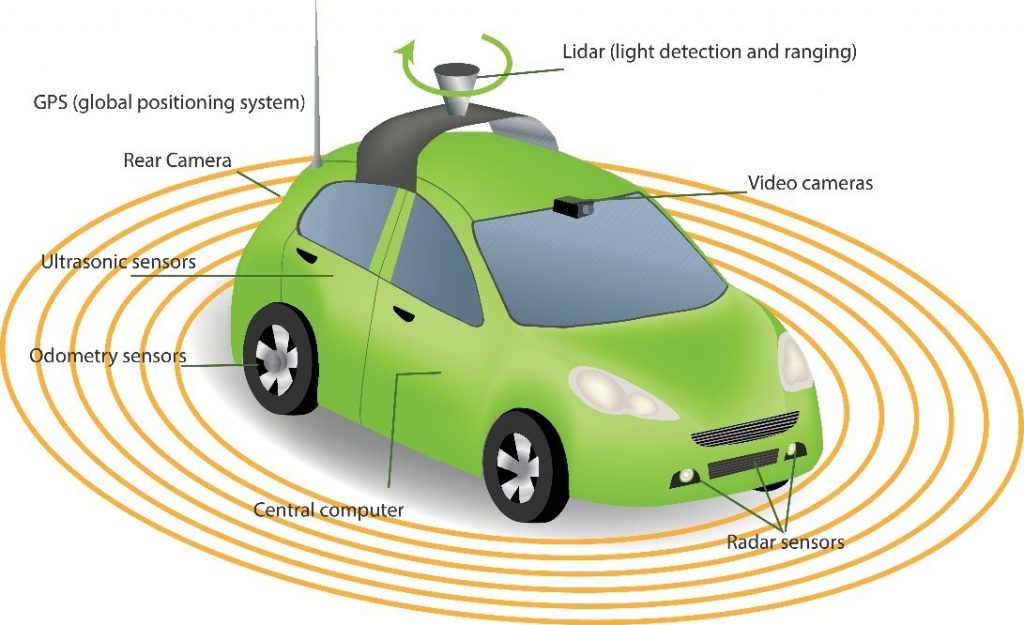
Ar hyn o bryd, mae cerbydau awtomataidd yn bwnc llosg yn y parthau modurol, ymchwil, rheoleiddio a deddfu, a ragwelir y byddant yn lleihau cyfraddau damweiniau'n sylweddol wrth i gerbydau awtomataidd gyrraedd y farchnad. Amcangyfrifir bod gwall dynol yn achosi neu'n cyfrannu i hyd at 90% o ddamweiniau ar y ffyrdd. Er mwyn sicrhau gostyngiad mewn damweiniau, mae peirianwyr yn datblygu meddalwedd uwch i yrru'r cerbyd heb yrrwr. I'w cynorthwyo, mae ganddynt amrywiaeth helaeth o synwyryddion, gan gynnwys RADAR, dyfeisiau canfod a mesur sy'n allyrru golau (LIDAR) a chamerâu confensiynol megis y rhai a geir mewn ffonau symudol.
Beth yw'r heriau technoleg?
Daw'r dechnoleg hon â sawl her. Er enghraifft, mae'n annhebygol y bydd y synwyryddion a ddefnyddir mewn cerbydau awtomataidd yn gweithio'n effeithiol os cânt eu defnyddio'n unigol gan fod cyfyngiadau gan bob un. Yn ogystal â hynny, ar yr amod bod technolegau gyrru awtomataidd yn parhau i gael eu datblygu fel y maent hyd yn hyn, gall y defnydd cyffredin o synwyryddion gwahanol, a'r feddalwedd gyfrifiadurol sy'n sail iddynt, fod yn hunllef o ran llunio polisïau!
Radar
Bu ymyrraeth yn bryder diweddar os caiff systemau RADAR modurol eu defnyddio'n helaeth ar gyfer gyrru rhaglenni awtomatiaeth gyrru. Gan fod y rhan fwyaf o systemau RADAR cyfoes yn gweithredu yn yr un band amledd (76-77 Ghz), mae pryder y gall achosion o ymyrraeth godi rhwng cerbydau sydd â systemau gyrru awtomataidd sy'n defnyddio RADAR lluosog, a bod nifer y cerbydau sydd â'r fath dechnoleg yn cynyddu. Gallai'r ymyrraeth hon gynyddu'r amser cyfrifiadura sydd ei angen oherwydd cynnydd yn yr hyn a elwir yn gymhareb signal â sŵn (lefel y signal a ddymunir â lefel y sŵn cefndir), a hyd yn oed arwain at "dargedau ysbryd", sy'n dangos rhwystrau lle nad oes rhai.
LIDAR
Dyfeisiau LIDAR yw bara menyn presennol synwyryddion mewn rhaglenni gyrru tra awtomataidd. Yn draddodiadol, mae synwyryddion LIDAR yn defnyddio cyfres o ddrychau neu brismau i greu 'cwmwl pwynt' o belydrau laser i gasglu gwybodaeth am eu hamgylchoedd. Mae'r synwyryddion hyn yn gywir o fewn cwpl o gentimedrau ac mae ganddynt ystod o oddeutu 100 metr.
Fodd bynnag, mae'r synwyryddion hyn yn sensitif i'r hyn a elwir yn "lleithder atmosfferig", gan fod y pelydrau laser yn llai na diferion dŵr, eira, niwl, a gronynnau llwch sy'n cynyddu'r "gymhareb signal â sŵn". Mae hyn, i bob pwrpas, yn cyfyngu ar ystod LIDAR i ystod debyg i olwg person yn yr amodau hyn.
Datgelwyd problem arall gyda synwyryddion LIDAR yn 2015, pan lwyddodd yr ymchwilydd diogelwch Jonathan Petit i hacio synwyryddion LIDAR a chyflwyno data ffug. Dyfynnwyd Jonathan yn dweud "I can take echoes of a fake car and put them at any location I want". Dywedodd ymhellach, “I can spoof thousands of objects and basically carry out a denial of service attack on the tracking system so it’s not able to track real objects”. Cyflawnwyd hyn i gyd trwy galedwedd rad (megis raspberry pi, neu Arduino, a phwyntydd laser), sy'n nodi y gall y fath wendidau fod yn darged i'r rhai sydd am darfu ar dechnoleg hunan-yrru.
Technoleg camera
Mae technoleg camera wedi bod yn elfen hanfodol o ran nodweddion awtomeiddio gyrru mewn cerbydau ers amser maith. Mae synwyryddion yn y camera'n hanfodol er mwyn sicrhau bod y cerbyd yn gosod ei hun yn gywir yn y lôn a, chan ddefnyddio camerâu stereo, mae'r cerbyd hefyd yn gallu mesur gwybodaeth am ddyfnder o'r ddelwedd. Un o'r rhai cyntaf i ddefnyddio camerâu ym maes awtomeiddio modurol oedd Prifysgol Carnegie Mellon yng nghanol y 90au a oedd yn defnyddio system un camera â chydraniad cymharol isel (440x525 o linellau teledu), gan ganiatáu i'r cerbyd osod ei hun yn y lôn. Y dyddiau hyn, mae cerbydau cyfoes yn aml yn defnyddio dau neu fwy o gamerâu cydraniad uchel, gyda Tesla yn defnyddio wyth. Mae defnyddio dau gamera'n cynnig rhai anfanteision gan fod y pŵer cyfrifiadura sydd ei angen i brosesu'r delweddau yn cynyddu gyda system camerâu stereo. Fodd bynnag, mae'r cymhlethdod meddalwedd ac algorithm yn is na system un camera, a all olygu bod systemau camera stereo'n fwy dibynadwy ac yn symlach i'w gweithredu, er bod angen mwy o bŵer cyfrifiadura arnynt.
Cyfuno synwyryddion
"Cyfuno synwyryddion" yw'r ateb i oresgyn y cyfyngiadau ym mhob un o'r synwyryddion unigol trwy gyfuno'r data o sawl ffynhonnell a chroeswirio canlyniadau pob synhwyrydd. Mae'r dull hwn hefyd yn sicrhau gormodedd - pe bai un synhwyrydd yn methu, mae digon o ddata o hyd i gynnal gweithrediadau diogel nes y gall gyrrwr wneud rhywbeth. Mae'r dull gormodedd yn gyffredin, er enghraifft, yn y diwydiant awyrofod lle mae gan awyrennau linellau hydrolig lluosog, cyfrifiaduron hedfan a synwyryddion. Yr anfantais yw ei fod yn ei gwneud yn ofynnol i gerbydau gael eu gosod â sawl synhwyrydd, a all gynyddu cost cerbydau'n sylweddol. Yn ogystal â hynny, dangoswyd yn ddiweddar fod yr enillion mewn o ran arbed tanwydd ac effaith amgylcheddol cerbydau awtomataidd yn fychan o'u cymharu â'r gofynion pŵer helaeth ar gyfer gwneud synnwyr o'r data sy'n dod o'r synwyryddion. Felly, mae angen gwaith i bennu cyfres addas o synwyryddion er mwyn cyflawni gyrru'n awtomataidd. Ymddengys fod hyn yn ymdrech y mae pob gweithgynhyrchydd yn ei gwneud ar ei ben ei hun, fel y dangosir gan yr cyfuniadau synwyryddion gwahanol a ddefnyddir gan y gweithgynhyrchwyr gwahanol.
Mae profi yn dod â'i heriau ei hun!
Mae angen mynd i'r afael â nifer o broblemau hefyd wrth brofi'r dechnoleg synwyryddion sydd ei hangen ar gyfer cerbydau awtonomaidd. Gan fod y swyddogaethau hyn yn cael eu hychwanegu at gerbydau a'u defnyddio mewn rhaglenni lle mae diogelwch yn hanfodol (er enghraifft, wrth ryngweithio â cherddwyr, beiciau neu senarios agos at wrthdrawiad), mae anhawster gwirio a gwerthuso'r swyddogaethau hyn mewn ffordd ddiogel yn cynyddu. Er enghraifft, i brofi nodwedd gyrru diogelwch neu awtomataidd, rhaid i'r peiriannydd prawf ysgogi'r system i'w therfynau synhwyrydd neu system, a all arwain at sefyllfaoedd peryglus. Yn ogystal â hynny, pe bai'r fath system yn cael ei hasesu ar gyfer y 'gyrrwr arferol' neu, yn well byth, ystod eang o yrwyr â galluoedd gwahanol (5ed-95ain ganradd), byddai'n rhaid peryglu sawl gyrrwr amhroffesiynol, neu osod senarios cymhleth ar draciau profi. Mae nifer o atebion i fynd i'r afael â'r problemau hyn, megis efelychu gyrru a phrofion byd go iawn, ac mae gan bob un ei fanteision a'i anfanteision.
Dylai efelychu gyrru a phrofion byd go iawn ar draciau profi ac mewn traffig fod yn rhan o'r gwaith o baratoi'r ffordd ar gyfer 'cymeradwyaeth math o gerbyd' gan lywodraethau. Mae amcangyfrifon diweddar wedi dangos bod yn rhaid i gerbydau awtonomaidd gael eu gyrru rhwng 1.6 miliwn a 11 biliwn o filltiroedd, gan gymryd hyd at 500 mlynedd ar gyfer fflyd o 100 o gerbydau, er mwyn asesu diogelwch technoleg gyrru awtomataidd yn ystadegol.
Ffigur 1 Cyfres synwyryddion bosibl cerbyd awtomataidd. Clod delwedd: Mostphotos
